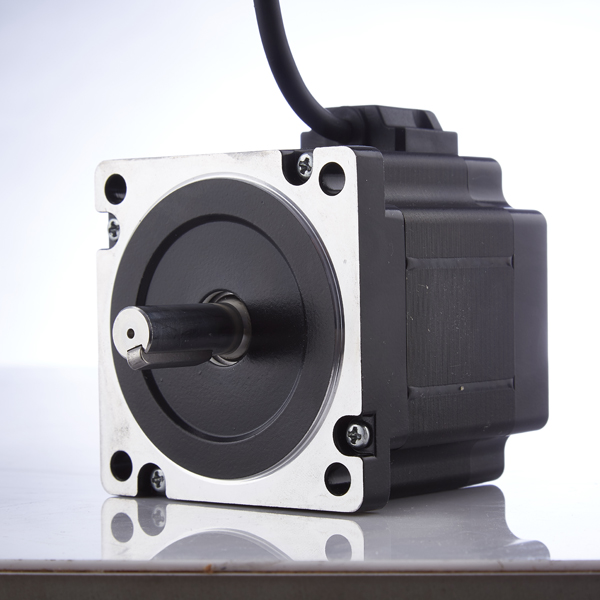
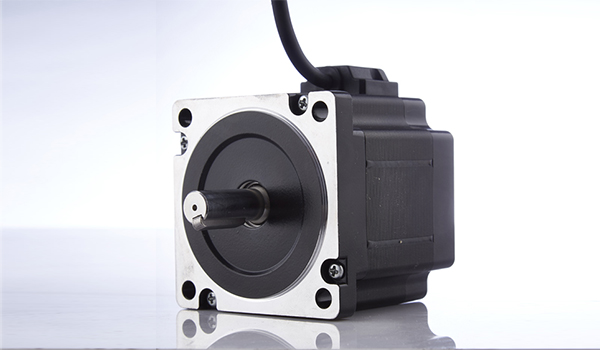
Stepper Motor Series
Stepper motor, also known as pulse motor, is a motor that converts electrical pulse signals into corresponding angular displacement or linear displacement. Its unique working principle and wide range of applications make stepper motors occupy an important position in modern industrial control systems.
See more
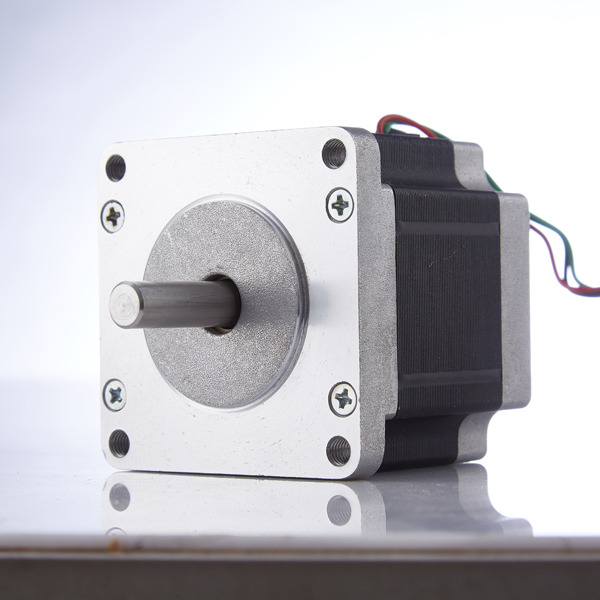
Special stepper motor series
Special stepper motors, as a type of stepper motor, also have the ability to convert electrical pulse signals into corresponding angular displacement or linear displacement. However, they may have more unique or specialized designs in some aspects to meet specific application requirements.
See more
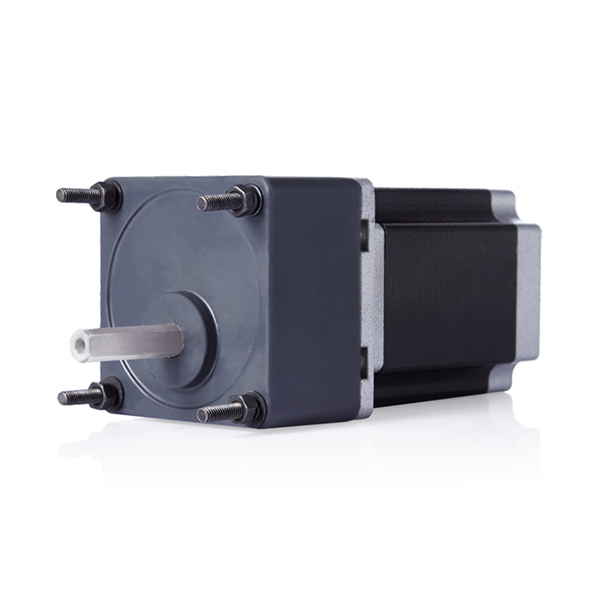
Driver Series
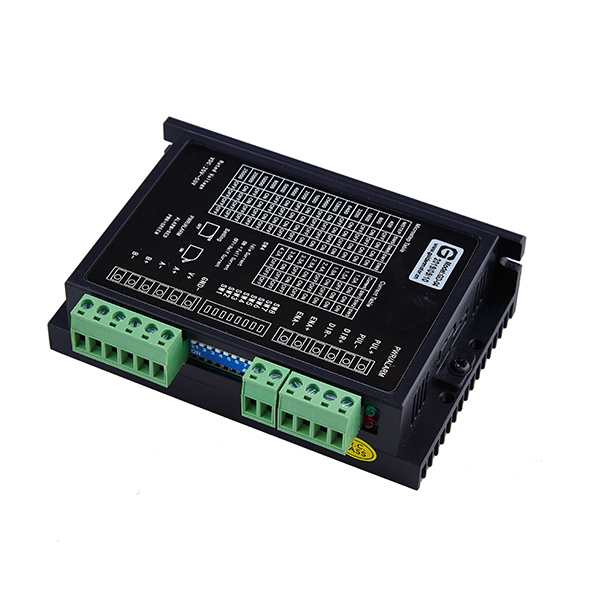
Driver, in the application of stepper motor, specifically refers to the stepper motor driver, which is an actuator that converts electrical pulses into angular displacement. It receives pulse signals from the control system (such as PLC, computer, etc.)……
See more
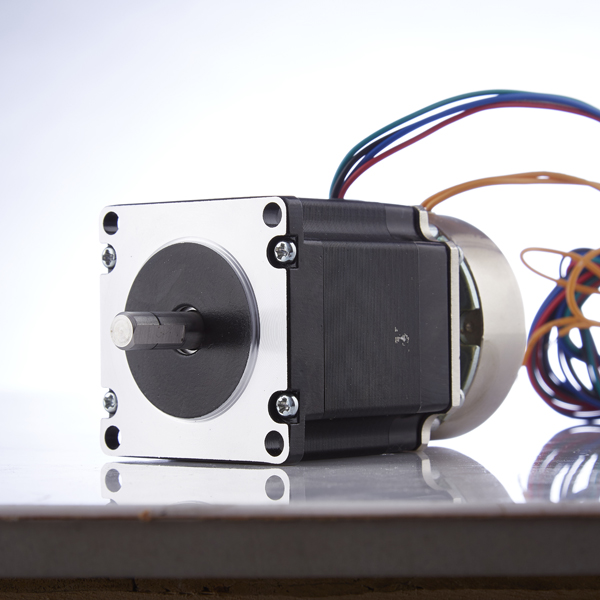
A stepper motor, as a type of controlled motor, can convert electrical pulse signals into angular displacement and is widely used in 3D printers, medical equipment, robots, and other fields. Previously, we wrote many articles explaining the operating principle of stepper motors, mostly focusing on the motor itself. However, for a stepper motor, the importance of the driver is similar to that of the operating system for a computer.
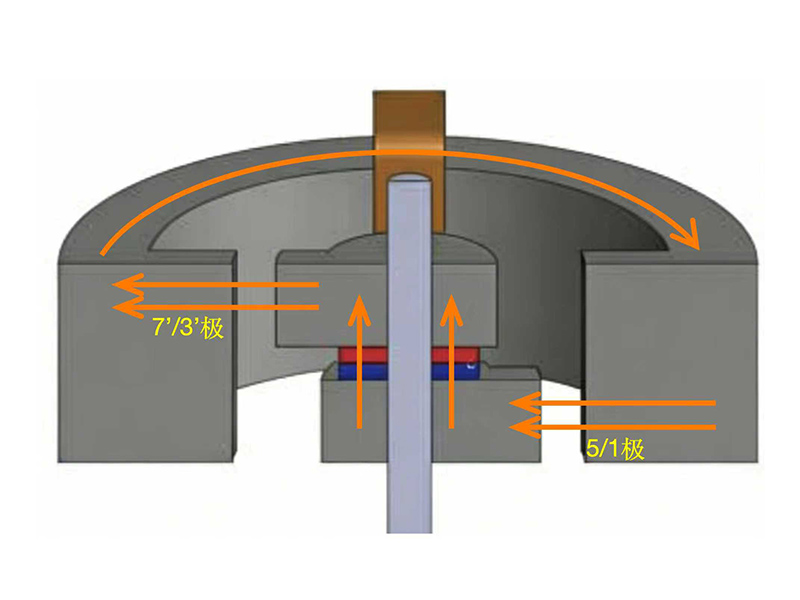
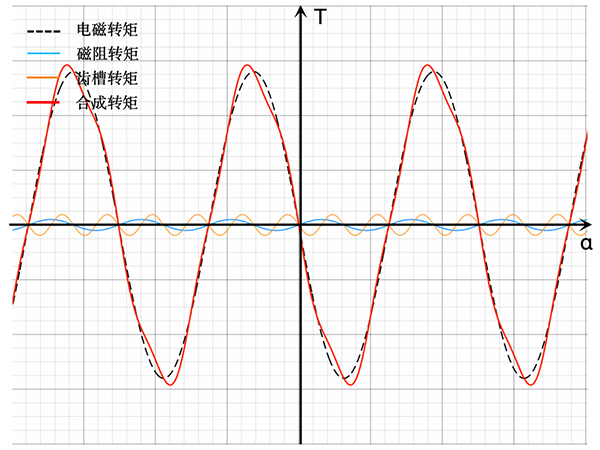
Stepper motors are mainly classified into three types: Permanent Magnet (PM), Variable Reluctance (VR), and Hybrid (HB). The torque of a PM stepper motor originates from the interaction between the stator excitation magnetic field and the rotor permanent magnetic field, known as electromagnetic torque. VR stepper motors contain no permanent magnets; their torque arises from the tendency of the salient-pole structure to minimize magnetic reluctance, referred to as reluctance torque. Hybrid stepper motors combine the characteristics of PM and VR types, so their torque results from the combined action of electromagnetic torque and reluctance torque. This paper details the torque sources of hybrid stepper motors.
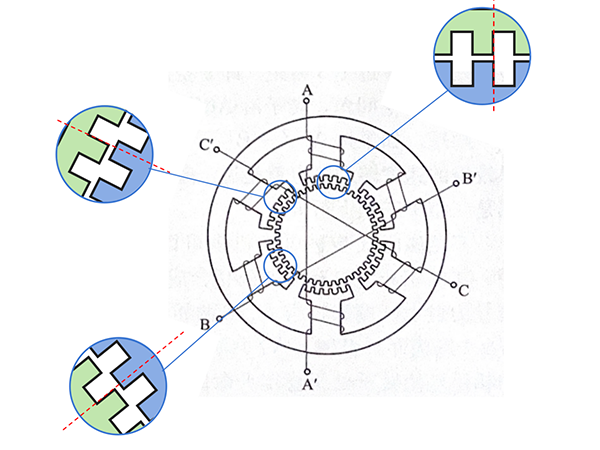
Stepper motors are mainly divided into three categories: Permanent Magnet (PM), Variable Reluctance (VR), and Hybrid (HB). The Hybrid type is a hybrid or combination of the former two. Therefore, from a principle perspective, the Permanent Magnet and Variable Reluctance types can be considered the most fundamental. Our previous articles have provided detailed introductions to Hybrid and Permanent Magnet stepper motors. This article will introduce the Variable Reluctance stepper motor, also known as the VR-type stepper motor.
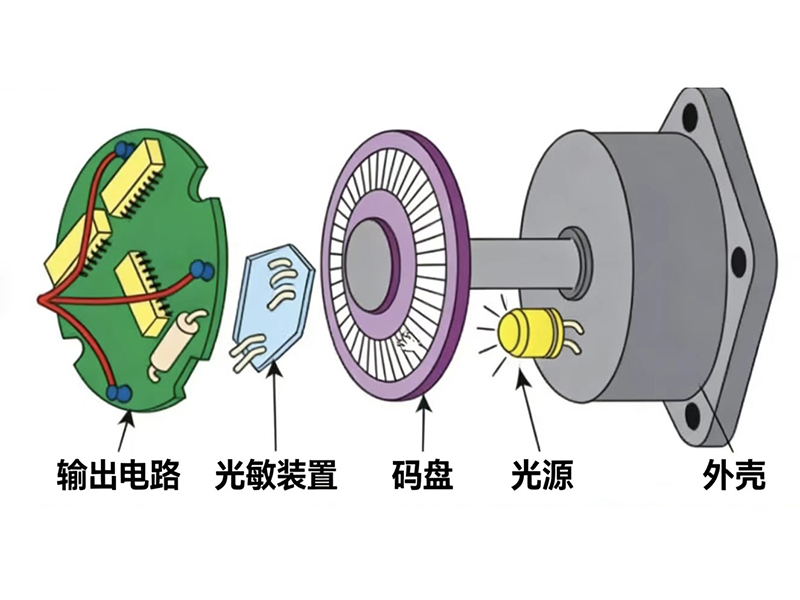
Encoder is a sensor that provides feedback on position/velocity in motor control, and is the key to achieving closed-loop control of the motor. The basic principle is to convert location information into signals such as light, magnetism, capacitance, etc., and then convert these information signals into electrical signals. Encoders can be divided into optoelectronic encoders, magnetic encoders, and capacitive encoders based on signal types
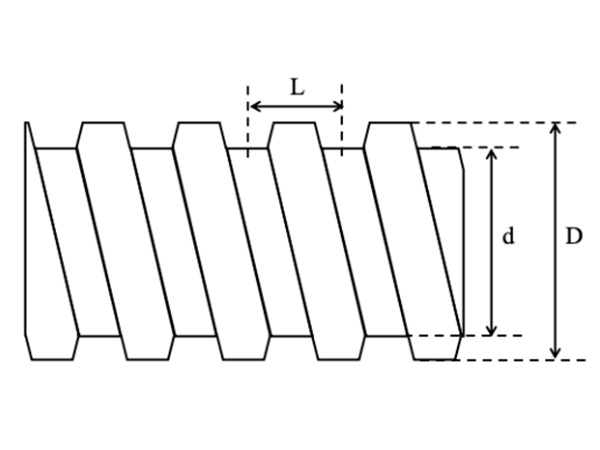
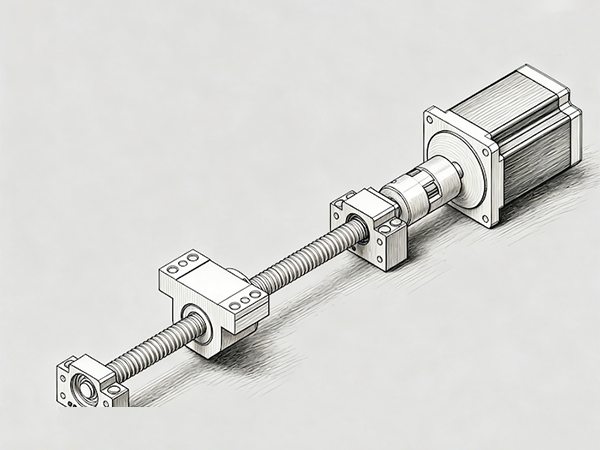
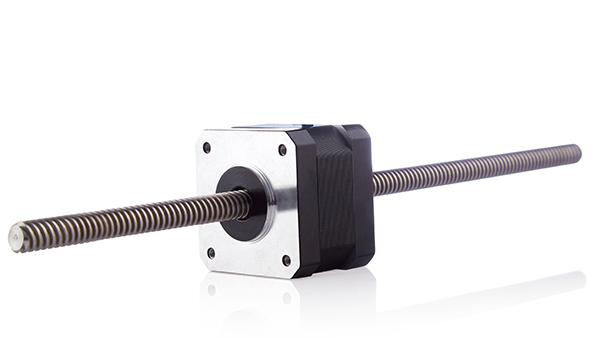
The lead screw mechanism is the most commonly used scheme for converting rotational motion to linear motion. The lead screw motor directly connects the shaft to the lead screw (or a hollow thread shaft), driving the thread to rotate. For lead screw motors, what we are concerned about is how the axial speed and the motor speed are related, and what is the connection between the axial push/pull force and the motor output torque
From the conveyor belt for sorting express delivery, to the xyz axis platform for 3D printers, to the main joint drive for simulation robots, scenes of linear motion can be seen everywhere in daily life. Obviously, regardless of the implementation path, the power source is always the motor that inputs rotational motion. So, what are the solutions to convert rotational motion into linear motion? Let's take a quick look.
This small motor, which looks rather ordinary—similar to the tiny DC motor found in those counterfeit Audi Twin Drill four-wheel-drive toy cars from childhood—is actually a PM (Permanent Magnet) stepper motor. Despite its compact size, it features a simple yet ingeniously designed structure.
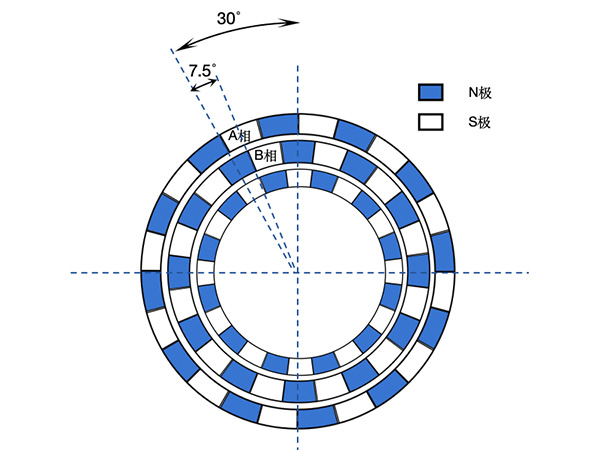
Taking a hybrid stepper motor with a step angle of 1.8 ° as an example. 50 teeth rotor; The stator has 8 poles, with 6 teeth per pole, for a total of 48 teeth.
Firstly, let's take a look at the static structure of the stator and rotor. The rotor is evenly arranged with 50 teeth. The stator has 48 teeth divided into 8 poles, with 6 teeth per pole. The tooth pitch on each pole is consistent with that of the rotor and can correspond one-to-one. The arrangement of stator teeth can be understood as follows: Cut off 2 complete teeth (i.e. 2 tooth tips and 2 tooth slots) from the 50 teeth that originally corresponded one-to-one with the rotor, and divide them into 8 poles evenly arranged on the circumference in sequence.
The key points of repairing stepper motors involve multiple aspects, including troubleshooting, maintenance checks, and repair measures for specific problems. Here are some key maintenance points:
Stepper motors and servo motors have significant differences in multiple aspects, mainly reflected in accuracy, control mode, feedback mode, torque, speed, torque frequency characteristics, overload characteristics, encoder type, response speed, vibration resistance, temperature rise, and price. Here is a detailed analysis of these differences:
here are significant differences between stepper motors and DC motors in multiple aspects, mainly reflected in control methods, accuracy, speed range, response speed, torque characteristics, cost, control complexity, and application fields.
Stepper motor is an open-loop control motor that converts electrical pulse signals into angular displacement or linear displacement. It is the main executing component in modern digital program control systems and has a wide range of applications. Do you know the reason for overheating of stepper motor bearings? Below, the editor will explain it to you.
Stepper motor is an open-loop control motor that converts electrical pulse signals into angular displacement or linear displacement. It is the main executing component in modern digital program control systems and has a wide range of applications. Do you know about the maintenance of stepper motors?
In previous articles, Jin's editor has explained some precautions for operating stepper motors. Now, we will continue to explain the requirements for cleaning stepper motors, hoping to be helpful to you.
Total15
Total Pages1 |
Current Page1
9Page 1
7Previous page
Next Page8
Last page:
Jump